創新融合 基于微服務與區塊鏈的高效項目管理系統探析——以高亞科技8Manage PM為例
在數字化轉型浪潮中,項目管理正經歷著深刻變革。傳統的管理方式在面對跨地域、多團隊、高復雜度的現代項目時,常常顯得力不從心。以高亞科技的8Manage PM系統為代表的創新解決方案,通過深度融合微服務架構、區塊鏈技術與專業的項目管理理念,為組織提供了全新的項目執行管理與信息技術咨詢服務支持平臺,引領了項目管理軟件的新范式。
一、 微服務架構:構建靈活可擴展的項目管理中樞
微服務架構的核心優勢在于將龐大的單體應用拆分為一組小型、自治的服務。在項目管理領域,這意味著系統可以按功能模塊(如任務管理、資源調度、成本控制、進度跟蹤、風險管理等)進行解耦和獨立部署。
- 靈活性與敏捷性:每個微服務可以獨立開發、升級和擴展,使系統能夠快速響應業務需求變化,支持敏捷開發和持續交付。項目團隊可以根據需要啟用或定制特定服務,實現高度個性化配置。
- 高可用性與韌性:單個服務的故障不會導致整個系統癱瘓,從而保障了項目關鍵數據的連續訪問與操作,對于時間敏感的項目執行至關重要。
- 技術異構性:不同的微服務可以采用最適合其任務的技術棧,例如,數據分析服務可能使用Python,而實時通信服務可能采用Go,從而優化整體性能。
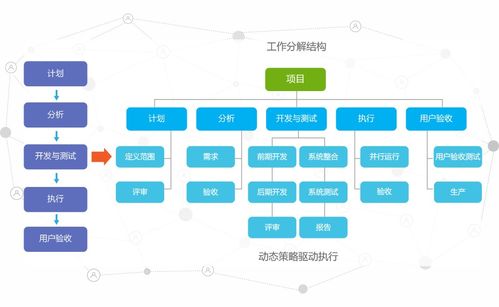
在8Manage PM等系統中,微服務架構使得從項目立項、計劃、執行到收尾的全生命周期管理,能夠像搭積木一樣靈活組合,無縫集成其他企業系統(如ERP、CRM),為項目管理提供堅實的技術底座。
二、 區塊鏈技術:賦能可信與透明的項目執行過程
區塊鏈的引入,為項目管理帶來了革命性的信任與審計機制。其不可篡改、可追溯、去中心化(或多中心化)的特性,完美契合了項目執行管理中對于過程真實性、數據可靠性與合同執行自動化的高要求。
- 增強信任與透明度:項目中的所有關鍵交易、審批記錄、成果交付物哈希、合同條款變更等,均可上鏈存證。所有參與方(客戶、承包商、供應商、監理方)在授權范圍內共享同一份可信數據源,極大減少了信息不對稱和爭議。
- 智能合約自動化執行:預設的智能合約可以自動觸發項目節點。例如,當某階段成果經鏈上驗證通過后,合約可自動釋放對應比例的付款,或啟動下一階段任務,大幅提升執行效率,降低人為干預風險。
- 強化溯源與合規:項目全過程的每一次變更、每一筆資金流向都有據可查,為事后審計、責任界定和合規性證明提供了不可辯駁的證據鏈,特別適用于政府項目、大型基建、研發合作等場景。
三、 一體化項目執行管理與信息技術咨詢服務的融合
現代項目管理軟件已不僅是工具,更是承載管理方法論和提供決策支持的平臺。以8Manage PM為例,它通常整合了以下核心功能,形成閉環管理:
- 全生命周期管理:覆蓋項目從機會識別、可行性研究、立項、規劃、執行、監控到收尾評價的每一個環節。
- 實時全景視圖:通過儀表盤和報表,實時展示項目進度、成本、資源、風險等關鍵績效指標(KPIs),幫助管理者一目了然地掌握項目健康狀態。
- 資源與成本精細管控:實現對人力、物料、設備等資源的優化調度與成本歸集,確保項目在預算內推進。
- 協作與溝通平臺:內置溝通工具,確保信息在項目團隊及相關方之間高效、準確地流動。
更重要的是,這類系統往往與信息技術咨詢服務深度綁定。服務提供商不僅交付軟件,更提供:
- 管理流程咨詢:幫助客戶梳理和優化現有的項目管理流程,使其與系統能力最佳匹配。
- 系統實施與集成服務:確保系統順利部署,并與組織現有IT環境無縫集成。
- 定制化開發與培訓:根據客戶特定行業或業務需求進行功能定制,并提供全面的用戶培訓,確保知識轉移。
- 持續優化支持:在系統上線后提供持續的技術支持、數據分析服務及流程優化建議,助力客戶持續提升項目管理成熟度。
四、 高亞科技8Manage PM的實踐啟示
高亞科技的8Manage PM系統作為市場先行者,其成功實踐表明,將前沿技術(微服務、區塊鏈)與扎實的項目管理實踐相結合,能夠創造出巨大價值。它不僅僅是一個IT工具,更是一個融合了先進技術、管理智慧和咨詢服務的綜合性解決方案。它幫助企業:
- 提升整體運營效率:通過自動化和流程優化,縮短項目周期,降低管理成本。
- 加強風險控制能力:實時監控與預警機制,結合區塊鏈的不可篡改性,使風險無處遁形。
- 做出更明智的決策:基于實時、可信的數據分析,支持管理層進行科學決策。
- 構建協同生態:連接項目內外所有利益相關者,在可信的平臺上實現高效協同。
###
項目管理系統的演進將繼續沿著智能化、集成化、可信化的方向深入。微服務架構提供了所需的靈活性與擴展性,區塊鏈技術奠定了信任與自動化的基石,而深度的信息技術咨詢服務則確保了技術價值能夠真正轉化為業務成果。對于尋求提升項目成功率和組織競爭力的企業而言,投資并善用此類融合創新的項目管理系統,無疑是在復雜多變的市場環境中構建核心優勢的關鍵一步。
如若轉載,請注明出處:http://www.huigirl.cn/product/29.html
更新時間:2026-06-19 20:47:50